

Шаговые двигатели востребованы в 3D-принтерах, ЧПУ-станках, робототехнике и автоматизации процессов, где требуется точное позиционирование. Они работают иначе, чем обычные двигатели: вместо постоянного вращения вал поворачивается на фиксированный угол – шаг. Управление таким двигателем требует точного сигнала, который можно сформировать с помощью микроконтроллера Arduino.
Для подключения чаще всего используется драйвер A4988 или DRV8825, который позволяет снизить нагрузку на микроконтроллер и обеспечивает микрошаговое управление. Питание шагового двигателя подается отдельно от Arduino, так как плата не рассчитана на высокий ток. Используйте внешний блок питания 12 В с достаточной мощностью (рекомендуется от 2 А и выше) и подключите его через драйвер, соблюдая полярность и параметры тока.
Шаги управления заключаются в подаче сигналов DIR (направление вращения) и STEP (импульсы шага) с помощью цифровых выходов Arduino. Один импульс на STEP соответствует одному шагу двигателя. Скорость вращения регулируется задержкой между импульсами, а направление – уровнем сигнала на DIR. При использовании библиотеки AccelStepper можно реализовать плавный разгон и торможение, повысив точность и стабильность работы.
Перед началом важно рассчитать ток обмоток и правильно откалибровать драйвер, иначе возможен перегрев и выход двигателя из строя. Используйте мультиметр и подстроечный резистор на драйвере для установки ограничения тока, ориентируясь на формулу, приведённую в документации конкретной модели.
Управление шаговым двигателем с Arduino: Пошаговое руководство
Установите перемычку между ENABLE и GND, чтобы активировать драйвер. Перед подачей питания обязательно отрегулируйте ток с помощью подстроечного резистора на драйвере, используя мультиметр и измеряя напряжение на референсном контакте (VREF). Для шагового двигателя с током обмотки 1.2 А оптимальное значение VREF составляет около 0.6 В.
Загрузите в Arduino следующий код:
const int dirPin = 4;
const int stepPin = 3;
void setup() {
pinMode(stepPin, OUTPUT);
pinMode(dirPin, OUTPUT);
digitalWrite(dirPin, HIGH); // Направление вращения
}
void loop() {
digitalWrite(stepPin, HIGH);
delayMicroseconds(800); // Задержка регулирует скорость
digitalWrite(stepPin, LOW);
delayMicroseconds(800);
}
Для изменения направления вращения измените логическое состояние DIR. Для настройки микрошагов используйте контакты MS1–MS3 на драйвере. Например, подключив MS1 и MS2 к 5V, получите режим 1/4 шага. Необходимость в этом возникает при требовании плавности хода или высокой точности позиционирования.
Избегайте резких изменений скорости – шаговый двигатель может пропускать шаги. Для плавного старта используйте ускорение, реализуемое программно. Пример: увеличивайте интервал задержки от 2000 до 800 мкс по мере начала движения.
Не используйте Arduino для питания двигателя – это приведёт к перегрузке. Применяйте отдельный источник питания с подходящей мощностью и обязательно соблюдайте полярность подключения. Следите за температурой драйвера – при нагреве выше 70°C устанавливайте радиатор или активное охлаждение.
Выбор шагового двигателя для проекта с Arduino

При выборе шагового двигателя для работы с Arduino важно учитывать несколько ключевых факторов, чтобы обеспечить оптимальную работу системы. Основные параметры, на которые стоит обратить внимание, включают тип двигателя, его напряжение, ток и механические характеристики.
Типы шаговых двигателей: Наиболее распространёнными являются два типа: униполярный и биполярный. У униполярных двигателей проще схема подключения, но они менее эффективны по сравнению с биполярными. Биполярные двигатели требуют более сложной схемы управления, но предоставляют большую мощность и точность при меньшем потреблении тока. Выбор типа зависит от требований проекта и используемой схемы управления.
Напряжение и ток: Каждое устройство требует питания с определёнными характеристиками. Напряжение и ток шагового двигателя должны соответствовать возможностям вашей источников питания и драйвера. Неправильный выбор может привести к перегрузке компонентов или даже их повреждению. Чтобы точно подобрать параметры, посмотрите на рабочие характеристики двигателя, указанные в его техническом паспорте.
Шаг угла: Шаг угла двигателя определяет точность его вращения. Для высокоточных приложений, таких как 3D-печать или CNC-станки, важно выбрать двигатель с меньшим углом шага (например, 1.8° или 0.9°). Для менее требовательных задач, например, в робототехнике, можно использовать шаговые двигатели с большим углом (например, 5° или 7.5°), которые будут дешевле и проще в управлении.
Крутящий момент: Крутящий момент является важным параметром при выборе двигателя. Он зависит от того, какую нагрузку нужно вращать, и от требуемой скорости вращения. При низкой нагрузке можно выбрать шаговый двигатель с меньшим крутящим моментом, но для тяжёлых конструкций или высокоскоростных приложений потребуется двигатель с высоким крутящим моментом. Для оценки необходимого крутящего момента можно использовать расчёты на основе силы, необходимой для перемещения нагрузки.
Управление двигателем: Важно выбрать шаговый двигатель, который будет поддерживать нужную вам схему управления. Для работы с Arduino обычно используют драйверы типа A4988 или DRV8825 для биполярных двигателей, которые обеспечивают точное управление шагами и током. Униполярные двигатели могут быть подключены с использованием простых драйверов, например, L298N.
В итоге, выбор шагового двигателя зависит от специфики проекта: точности, мощности, удобства подключения и характеристик управления. При правильном подходе можно получить высокую производительность и надёжность работы всей системы с Arduino.
Подключение шагового двигателя к Arduino через драйвер
Для управления шаговым двигателем через Arduino необходимо использовать драйвер. Это устройство позволяет контролировать питание мотора и передавать сигналы от Arduino. Один из популярных драйверов для шаговых двигателей – A4988, который часто используется в таких проектах.
После этого подключите драйвер к Arduino. Для управления шаговым двигателем через A4988, используйте следующие пины Arduino:
- STEP – пин, через который передаются импульсы для шага.
- DIRECTION – пин, определяющий направление вращения двигателя.
- ENABLE – пин для включения/выключения драйвера. Обычно используется для экономии энергии, когда двигатель не активен.
Подключите VDD и GND на A4988 к 5 В и GND Arduino соответственно. Для питания мотора используйте отдельный источник питания, так как шаговый двигатель требует большего тока, чем может предоставить Arduino. Подключите VMOT и GND драйвера к источнику питания.
Пример подключения для Arduino Uno:
- STEP – пин 3
- DIRECTION – пин 4
- ENABLE – пин 5 (опционально)
Теперь можно писать программу для управления шаговым двигателем. Библиотека AccelStepper позволит вам задать количество шагов, скорость и ускорение, а также плавно изменять параметры работы мотора.
Не забывайте, что шаговый двигатель при работе может сильно нагреваться, особенно при высоких нагрузках. Поэтому важно использовать радиатор охлаждения и обеспечивать правильное питание для стабильной работы системы.
Программирование шагового двигателя с использованием библиотеки Stepper
Для управления шаговым двигателем с помощью Arduino можно использовать стандартную библиотеку Stepper, которая значительно упрощает процесс программирования. Эта библиотека позволяет легко задать количество шагов и скорость вращения, а также контролировать направление вращения двигателя.
Для начала необходимо подключить библиотеку Stepper в ваш проект. В Arduino IDE это делается с помощью следующей строки кода:
#include
Stepper stepper(200, 8, 9, 10, 11);
Для управления двигателем, в основном используются два метода: step() и setSpeed().
step()– используется для перемещения на заданное количество шагов. Например, чтобы двигаться на 100 шагов вперед:
stepper.step(100);
setSpeed()– устанавливает скорость вращения двигателя в шагах в минуту (RPM). Например, для установки скорости 60 шагов в минуту:
stepper.setSpeed(60);
Важно, что скорость и количество шагов влияют на точность и плавность движения. Высокая скорость может привести к потере шагов, если двигатель не успевает выполнять команды.
Для получения максимальной точности рекомендуется устанавливать скорость с учетом характеристик конкретного двигателя и питания. Например:
stepper.setSpeed(100);
Для выполнения одного оборота в одну сторону, можно использовать:
stepper.step(200);
Для вращения в противоположную сторону:
stepper.step(-200);
Таким образом, можно программно управлять шаговым двигателем, задавая количество шагов и скорость вращения в любую сторону. Убедитесь, что питание и подключение двигателей соответствуют требованиям для стабильной работы системы.
Для более сложных операций, таких как вращение на заданный угол или контроль позиции, можно комбинировать эти методы с другими функциями, например, задержками или использованием переменных для динамической настройки параметров. Важно помнить, что использование библиотеки Stepper ограничено стандартным числом шагов и частотой работы, поэтому для высокоскоростных или более точных применений, возможно, стоит рассмотреть другие библиотеки или подходы.
Настройка шагов и скорости вращения мотора в коде
Для управления шаговым двигателем с использованием Arduino важную роль играют параметры шагов и скорости вращения. Эти настройки определяют, как будет работать мотор, включая плавность движения и точность выполнения задания.
Для начала необходимо определить количество шагов, которые мотор должен сделать для полного оборота. Например, у шагового двигателя с угловым шагом 1.8° потребуется 200 шагов для одного полного оборота (360° / 1.8°). Если мотор с другим углом шага, количество шагов для полного оборота будет изменяться.
Основным элементом управления шаговым двигателем является функция step(), которая используется для перемещения двигателя на один шаг. Важно правильно задать скорость вращения и количество шагов. Скорость вращения регулируется с помощью функции setSpeed() из библиотеки Stepper.
Для настройки шага и скорости можно использовать следующий код:
#include
const int stepsPerRevolution = 200; // количество шагов для одного полного оборота
Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11); // подключение пинов
void setup() {
myStepper.setSpeed(60); // задаём скорость в об/мин (RPM)
}
void loop() {
myStepper.step(stepsPerRevolution); // один полный оборот
delay(1000); // пауза между оборотами
}
В данном примере скорость вращения установлена на 60 оборотов в минуту (RPM), что соответствует 1 обороту за 1 секунду. Вы можете настроить значение скорости в диапазоне от 1 до 100 об/мин, в зависимости от характеристик вашего мотора и требований к точности.
Кроме того, для увеличения точности и уменьшения вибраций рекомендуется снижать скорость в случае необходимости, особенно при работе с большими нагрузками. Также стоит учитывать, что при очень высокой скорости шаговый двигатель может потерять шаги или работать с меньшей точностью, поэтому важно выбирать оптимальные значения.
Настройка шага и скорости зависит от конструкции вашей системы и задачи. Иногда требуется экспериментировать с различными значениями для достижения наилучших результатов.
Проверка работы шагового двигателя на малых оборотах
При работе шагового двигателя на малых оборотах важно правильно настроить параметры управления, чтобы избежать потери шагов и улучшить стабильность вращения. Для этого нужно учитывать характеристики конкретного двигателя, а также качество питания и используемые драйверы.
Для начала убедитесь, что ваше питание соответствует требованиям шагового двигателя. Часто для малых оборотов требуется низкое напряжение и стабильный ток. Невозможность обеспечить правильное питание может привести к неравномерному вращению или даже остановке двигателя.
Следующий шаг – настройка шага. На малых оборотах особенно важен правильный выбор количества шагов на оборот. Если шаг слишком большой, двигатель будет прыгать от одного положения к другому, что создаст механический шум и нестабильность работы. Наоборот, маленький шаг обеспечит плавную работу, но может потребовать большего времени на оборот, что важно учитывать при проектировании системы.
Пример кода для контроля скорости:
void setup() {
pinMode(8, OUTPUT);
pinMode(9, OUTPUT);
}
void loop() {
digitalWrite(8, HIGH);
digitalWrite(9, LOW);
delay(10); // Малые обороты
digitalWrite(8, LOW);
digitalWrite(9, HIGH);
delay(10);
}
В приведенном примере задержка в 10 миллисекунд создает шаг на малых оборотах. Для еще более медленной работы увеличьте значение задержки. Следите за тем, чтобы задержка была достаточно большой для получения стабильного вращения, но не слишком долгой, чтобы не привести к слишком сильному уменьшению скорости.
Рекомендация: Для улучшения работы на малых оборотах используйте драйвера с микрошаговым управлением, чтобы уменьшить вибрации и повысить точность вращения.
Особое внимание стоит уделить охлаждению. При работе на малых оборотах двигатель может нагреваться, особенно если используется драйвер с высоким током. Мониторинг температуры поможет избежать перегрева и повреждений компонентов системы.
Создание схемы для управления шаговым двигателем с использованием кнопок
Для управления шаговым двигателем с помощью кнопок необходимо правильно соединить компоненты и разработать схему, которая позволит управлять направлением и количеством шагов двигателя. В этой части рассмотрим, как подключить шаговый двигатель, кнопки и Arduino.
Для управления шаговым двигателем с помощью кнопок потребуется две кнопки. Одна будет отвечать за направление вращения (вперед/назад), а другая – за количество шагов, которые должен выполнить двигатель. Подключим кнопки к цифровым входам Arduino через резисторы подтяжки для предотвращения случайных срабатываний.
Схема подключения:
- Драйвер ULN2003 подключается к четырем цифровым пинам Arduino (например, 8, 9, 10, 11).
- Первая кнопка подключается к цифровому входу (например, к пину 2) и к земле.
- Вторая кнопка подключается к пину 3 и земле.
Для обеспечения корректной работы схемы используйте подтягивающие резисторы, чтобы избежать неопределенных состояний на пинах, к которым подключены кнопки. Каждая кнопка будет замыкать цепь на землю при нажатии, что будет восприниматься Arduino как сигнал для выполнения соответствующего действия.
После подключения компонентов можно приступить к написанию кода, который будет отслеживать нажатие кнопок и выполнять соответствующие действия: изменение направления вращения или количество шагов. В коде необходимо реализовать проверку состояния кнопок и изменение состояния драйвера в зависимости от этих сигналов.
Следующий этап – обеспечение плавности работы двигателя, например, с помощью библиотеки Stepper для упрощения управления шаговым двигателем.
Важно следить за безопасностью работы схемы, особенно при подключении внешних источников питания, чтобы не повредить Arduino или компоненты схемы.
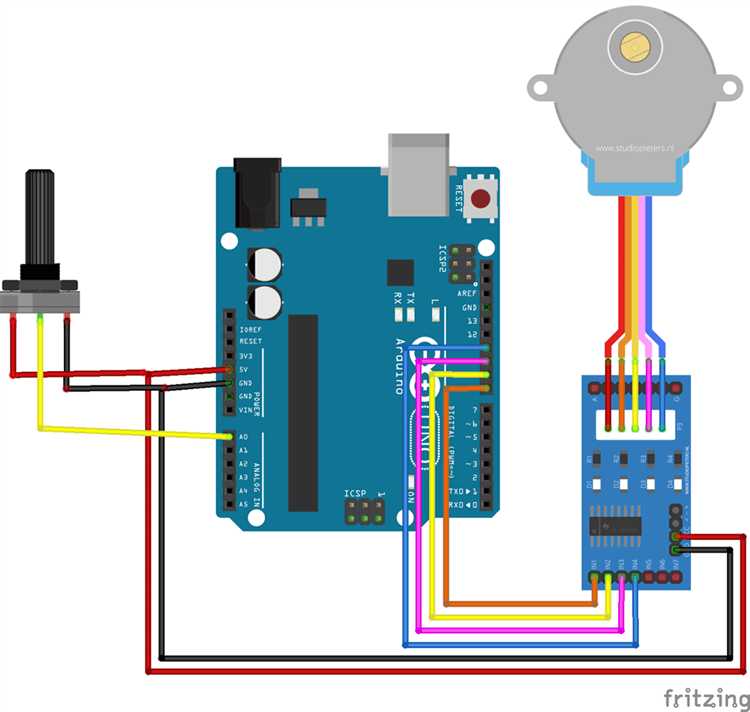
Реализация управления шаговым двигателем с помощью Potentiometer
Для управления шаговым двигателем с использованием потенциометра, требуется Arduino, шаговый двигатель, драйвер (например, A4988 или DRV8825) и сам потенциометр. В этом проекте потенциометр будет регулировать скорость вращения шагового двигателя в реальном времени.
Основная задача – преобразовать значение сопротивления потенциометра в соответствующее значение для скорости шагового двигателя. Arduino будет считывать положение потенциометра и изменять частоту импульсов, подаваемых на драйвер шагового двигателя.
Необходимые компоненты

- Arduino (например, Arduino Uno)
- Шаговый двигатель
- Драйвер шагового двигателя (A4988 или DRV8825)
- Потенциометр (10 кОм)
- Провода для соединений
- Источник питания для шагового двигателя
Схема подключения
Подключите потенциометр к аналоговому пину Arduino (например, A0), а шаговый двигатель через драйвер – к цифровым пинам Arduino. Пример подключения:
- Драйвер шагового двигателя: Подключите шаговый двигатель к выходам драйвера, а затем управляющие пины (STEP и DIR) подключите к цифровым пинам Arduino (например, D3 и D4).
Программная реализация
Для управления шаговым двигателем через потенциометр, используйте следующую программу:
const int stepPin = 3; // Пин STEP драйвера
const int dirPin = 4; // Пин DIR драйвера
const int potPin = A0; // Пин подключения потенциометра
void setup() {
pinMode(stepPin, OUTPUT);
pinMode(dirPin, OUTPUT);
pinMode(potPin, INPUT);
}
void loop() {
int potValue = analogRead(potPin); // Считывание значения с потенциометра
int speed = map(potValue, 0, 1023, 1000, 100); // Преобразование в скорость
// Управление направлением вращения
if (potValue < 512) {
digitalWrite(dirPin, LOW); // Направление в одну сторону
} else {
digitalWrite(dirPin, HIGH); // Направление в другую сторону
}
// Генерация импульсов для управления шаговым двигателем
for (int i = 0; i < speed; i++) {
digitalWrite(stepPin, HIGH);
delayMicroseconds(1000);
digitalWrite(stepPin, LOW);
delayMicroseconds(1000);
}
}
В данном примере функция analogRead(potPin) считывает текущее значение потенциометра, а затем преобразует его в скорость с помощью функции map(). Значение переменной speed определяет длительность пауз между импульсами, что влияет на скорость вращения двигателя. Меньше значение – быстрее вращение.
Тонкости настройки

- Потенциометр может быть калиброван, чтобы обеспечить нужный диапазон регулировок. Использование функции
map()позволяет настроить максимальную и минимальную скорость вращения. - Обратите внимание на питание шагового двигателя. Многие шаговые двигатели требуют отдельного источника питания, отличного от питания Arduino.
- При использовании драйвера A4988 или DRV8825 настройте резистор тока на правильный уровень, чтобы избежать перегрева и повреждения шагового двигателя.
- Если двигатель не вращается плавно, попробуйте уменьшить значения задержки между импульсами, но следите за тем, чтобы скорость не стала слишком высокой для вашего драйвера и двигателя.
Таким образом, потенциометр позволяет динамично управлять шаговым двигателем, изменяя его скорость в реальном времени, что делает систему более гибкой для различных приложений.
Отладка и решение проблем при работе с шаговым двигателем на Arduino
При работе с шаговым двигателем на Arduino часто возникают проблемы, которые могут мешать корректной его работе. Чтобы правильно отладить систему, необходимо понимать возможные причины неисправностей и способы их устранения.
Если шаговый двигатель не вращается или вращается с ошибками, проверьте напряжение на выходах драйвера с помощью мультиметра. На некоторых моделях драйверов есть потенциометры для настройки максимального тока, и если они установлены неправильно, двигатель может не получить достаточную мощность для нормальной работы.
Если двигатель начинает дрожать или вибрировать, а не вращаться плавно, это может быть связано с несоответствием частоты импульсов и характеристик мотора. Проблему можно решить снижением частоты шагов или настройкой ускорения, если ваша библиотека поддерживает такие параметры.
Если шаговый двигатель работает, но с малой мощностью или не может выдержать нагрузку, проверьте характеристики источника питания. Например, некоторые драйверы требуют стабильного напряжения от 12 до 24 В, и использование нестабильного источника питания может привести к сбоям в работе.
Если после всех проверок двигатель все равно не работает корректно, можно попробовать следующее:
- Проверить версию прошивки Arduino, убедитесь, что библиотека для работы с шаговыми двигателями актуальна.
- Заменить шаговый двигатель, чтобы проверить, не является ли проблема в его неисправности.
Тщательная диагностика и пошаговая проверка всех компонентов системы помогут устранить большинство проблем при работе с шаговым двигателем на Arduino.
Вопрос-ответ:
Что такое шаговый двигатель и для чего его используют?
Шаговый двигатель — это электрический мотор, который выполняет вращение с определенными углами. Каждый его шаг соответствует небольшому повороту вала, что позволяет точно управлять его позицией. Шаговые двигатели часто используются в таких устройствах, как 3D-принтеры, роботы и другие системы, требующие точного позиционирования.
Как подключить шаговый двигатель к плате Arduino?
Для подключения шагового двигателя к Arduino, вам нужно использовать драйвер шагового двигателя, например, ULN2003 или A4988, в зависимости от типа двигателя. После подключения драйвера к Arduino с использованием цифровых выводов для подачи сигналов, подключаете шаговый двигатель к выходам драйвера. Также важно подключить питание для самого двигателя, так как Arduino не может обеспечить достаточную мощность для работы большинства шаговых двигателей.
Какие библиотек можно использовать для управления шаговым двигателем на Arduino?
Для управления шаговым двигателем на Arduino существует несколько популярных библиотек, например, Stepper и AccelStepper. Библиотека Stepper предоставляет базовые функции для работы с шаговыми двигателями, а AccelStepper — более продвинутый вариант, поддерживающий более плавное и точное управление, включая возможность изменения скорости вращения.
Как можно контролировать скорость вращения шагового двигателя с Arduino?
Скорость вращения шагового двигателя можно контролировать через программное обеспечение Arduino. Для этого нужно изменять скорость импульсов, которые подаются на двигатель. Библиотека Stepper позволяет задать скорость через функцию setSpeed(), где указывается количество шагов в секунду. Если вы используете библиотеку AccelStepper, то можно задавать ускорение и замедление, что позволяет сделать движение более плавным.





