

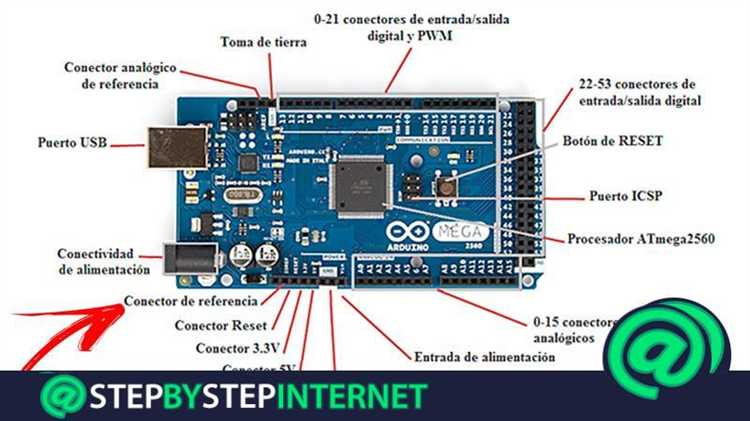
Одной из ключевых задач при работе с микроконтроллерами на базе платформы Arduino является определение времени, прошедшего с момента запуска устройства. Для решения этой задачи можно использовать встроенные возможности языка программирования Arduino, которые позволяют точно отслеживать временные интервалы без необходимости использования дополнительных внешних компонентов.
Основной инструмент для этого – функция millis(), которая возвращает количество миллисекунд, прошедших с момента включения платы. Эта функция позволяет без проблем отслеживать продолжительность работы системы, будь то для мониторинга активности устройства или для оптимизации программной логики в зависимости от времени работы.
Использование millis() не требует сложных вычислений или внешних устройств. Однако стоит помнить о некоторых ограничениях. Например, функция возвращает значения в пределах 4 миллиардов миллисекунд, что соответствует примерно 49.7 дням. После этого счетчик возвращается к нулю, что может привести к ошибкам при долгосрочной эксплуатации устройства. Для большинства практических задач этого достаточно, но для длительных проектов можно использовать дополнительные методы защиты от переполнения счетчика времени.
Если нужно точно отслеживать время работы платы с учетом переполнений, можно воспользоваться дополнительными проверками или использовать тип данных unsigned long, который позволяет корректно обработать возможные обнуления счетчика.
Как измерить время работы с помощью millis() на Arduino?
Функция millis() на Arduino возвращает количество миллисекунд, прошедших с момента включения платы. Это простой и эффективный способ отслеживания времени работы устройства без использования внешних таймеров или реального времени.
Для измерения времени работы программы с использованием millis(), достаточно просто вызвать эту функцию и сохранить результат в переменную типа unsigned long. Эта переменная будет хранить количество миллисекунд, прошедших с момента старта устройства. Важно помнить, что значение millis() увеличивается до 4,294,967,295, после чего происходит переполнение, и счетчик возвращается к нулю. Переполнение происходит примерно каждые 50 дней, но в большинстве случаев это не является проблемой, так как для большинства проектов такая точность достаточна.
Пример кода для измерения времени работы:
unsigned long startTime;
unsigned long elapsedTime;
void setup() {
startTime = millis(); // Записываем время старта
Serial.begin(9600);
}
void loop() {
elapsedTime = millis() - startTime; // Вычисляем время работы
Serial.print("Время работы: ");
Serial.print(elapsedTime / 1000); // Преобразуем в секунды
Serial.println(" секунд");
delay(1000); // Печатаем каждую секунду
}
Для более точного отслеживания времени работы в реальных условиях, следует учитывать, что millis() имеет точность в пределах миллисекунд, но может давать небольшие отклонения из-за особенностей работы микроконтроллера и работы других процессов на плате. Если важна высокая точность, можно использовать внешние таймеры или более сложные схемы, но для большинства проектов millis() будет достаточен.
Если проект требует отслеживания времени работы в течение нескольких месяцев или лет, важно учитывать переполнение значения millis(). Для этого можно использовать дополнительные методы для отслеживания переполнения, например, проверку на переполнение с использованием дополнительных условий.
Использование функции micros() для точных измерений времени
Функция micros() в Arduino возвращает количество микросекунд с момента включения платы. Это позволяет проводить измерения времени с точностью до 4 микросекунд, что значительно превышает возможности функции millis(), которая измеряет время в миллисекундах. micros() полезна в задачах, где важна высокая точность, например, при работе с временными интервалами в микро- или миллисекундном масштабе.
Возвращаемое значение функции – это 32-битное число, которое переполняется через примерно 70 минут работы устройства. Однако переполнение не является проблемой в большинстве приложений, так как для вычислений можно использовать операцию по модулю для корректного учета времени после переполнения.
Для использования micros() в точных измерениях времени важно помнить, что функция работает с некоторой погрешностью, зависящей от частоты тактового сигнала микроконтроллера. Например, на некоторых платах Arduino, таких как Uno, тактовая частота составляет 16 МГц. В таких случаях точность измерений будет составлять около 4 микросекунд.
Пример использования micros() для измерения времени выполнения кода:
unsigned long startTime = micros();
// Код, время выполнения которого необходимо измерить
unsigned long elapsedTime = micros() - startTime;
Такой подход позволяет эффективно замерять продолжительность выполнения различных операций, включая работу с внешними устройствами, обработку сигналов и другие временные интерваллы. Особенно полезен micros() при работе с высокоскоростными процессами, где задержки в несколько миллисекунд могут повлиять на результат.
Однако важно учитывать, что постоянный вызов функции micros() может увеличить нагрузку на процессор, особенно в цикличных и ресурсоемких операциях. В таких случаях стоит балансировать между точностью измерений и эффективностью работы системы.
Как учесть перезагрузки платы Arduino при расчете времени работы?

При длительном использовании Arduino важно точно учитывать все перезагрузки, так как они могут повлиять на расчёт времени работы устройства. Стандартный способ подсчёта времени на Arduino – использование функции millis(), которая возвращает количество миллисекунд с момента включения платы. Однако при перезагрузке микроконтроллер сбрасывает это значение, что делает учёт времени ненадёжным без дополнительных мер.
Для корректного расчёта времени работы, необходимо отслеживать перезагрузки и накапливать значение времени между ними. Один из методов – записывать текущее значение millis() в энергонезависимую память, например, в EEPROM, при каждом старте устройства. Это позволит при следующем включении восстановить предыдущее значение времени и продолжить отсчёт без потери данных.
Алгоритм работы следующий: при каждом включении или перезагрузке программы считывается значение времени, сохранённое в EEPROM. Затем, текущее значение millis() добавляется к этому времени, учитывая прошедшее время с последней перезагрузки. Это можно сделать с использованием простой формулы:
totalTime = previousTime + (millis() - lastRestartTime);
Где previousTime – это время работы до последней перезагрузки, а lastRestartTime – время, когда устройство было перезагружено.
Чтобы избежать излишнего записи в EEPROM, можно обновлять значения, например, раз в минуту или только если прошло значительное количество времени. Важно также предусмотреть защиту от переполнения значения millis() (после примерно 50 дней работы), добавив логику для корректного пересчёта времени.
Таким образом, учёт перезагрузок при расчёте времени работы Arduino требует дополнительных усилий, но это позволяет обеспечить точность и надёжность работы устройства в долгосрочной перспективе.
Преимущества использования встроенного таймера для контроля времени работы
Использование встроенного таймера на платах Arduino значительно упрощает контроль за временем работы устройства. Таймеры позволяют точнее измерять длительность работы, минимизируя нагрузку на процессор. Это особенно важно при реализации задач с высокими требованиями к времени реакции, например, в системах управления или мониторинга.
1. Эффективность использования ресурсов
Arduino оснащена несколькими встроенными таймерами, которые работают независимо от основного процессора. Это позволяет значительно снизить нагрузку на центральный процессор, освобождая его для выполнения других задач. В отличие от программных решений, таймеры работают на аппаратном уровне, что делает их гораздо более точными и быстрыми.
2. Точность и стабильность
Встроенные таймеры в Arduino обеспечивают высокую точность измерения времени, что важно для проектов, где требуется соблюдение жестких временных ограничений. Используя таймеры, можно избежать погрешностей, которые могут возникать при использовании стандартных функций задержек, таких как delay().
3. Уменьшение потребления энергии
Когда таймер настроен на выполнение задачи через определенные интервалы времени, процессор может перейти в спящий режим между событиями. Это способствует снижению общего потребления энергии устройства, что критично для проектов с ограниченными ресурсами питания, например, в автономных системах на батареях.
4. Возможность многозадачности
С помощью встроенных таймеров можно организовать параллельную работу нескольких задач, что особенно полезно в сложных проектах, где важно управлять несколькими событиями одновременно. Например, можно настроить таймер для обработки сигналов с датчиков, не прерывая выполнения основного кода.
5. Программная простота и гибкость
Настройка таймеров в Arduino не требует сложных библиотек или внешних компонентов. Достаточно нескольких строк кода для конфигурации таймера и его интеграции с основным циклом программы. При этом можно точно контролировать периоды, длительность и частоту выполнения задач, что делает систему гибкой и адаптируемой под различные сценарии.
Использование встроенного таймера – это надежный и эффективный способ контроля времени работы устройства на платформе Arduino, обеспечивающий точность, низкое потребление энергии и высокую гибкость в проектировании.
Как настроить и использовать внешний таймер на Arduino для более долгосрочных проектов?
Для долгосрочных проектов с Arduino, где требуется точное измерение времени или стабильное отслеживание длительных интервалов, использование встроенных таймеров может быть ограничено. В таких случаях внешний таймер позволяет значительно улучшить точность и надежность работы системы.
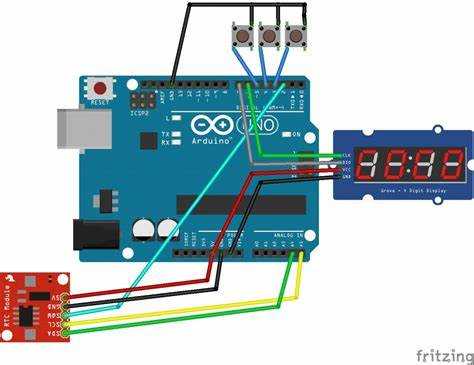
Один из наиболее распространённых вариантов – это использование модулей реального времени (RTC), таких как DS3231. Этот чип обеспечит точный отсчёт времени даже при выключении питания Arduino. Чтобы настроить RTC, потребуется подключить его к Arduino через интерфейс I2C и установить библиотеку для работы с ним, например, RTClib.
Для подключения DS3231 к Arduino используйте следующие пины: SDA – на A4 (для Arduino Uno), SCL – на A5. После этого можно получить точные данные о текущем времени, а также настроить таймеры с необходимой периодичностью.
Пример кода для настройки RTC и получения текущего времени:
#include#include RTC_DS3231 rtc; void setup() { Serial.begin(9600); if (!rtc.begin()) { Serial.println("Не удалось найти RTC"); while (1); } } void loop() { DateTime now = rtc.now(); Serial.print(now.year(), DEC); Serial.print('/'); Serial.print(now.month(), DEC); Serial.print('/'); Serial.print(now.day(), DEC); Serial.print(" "); Serial.print(now.hour(), DEC); Serial.print(':'); Serial.print(now.minute(), DEC); Serial.print(':'); Serial.print(now.second(), DEC); Serial.println(); delay(1000); }
Такой подход подходит для проектов, где необходимо отслеживать время в реальном времени и использовать его для активации событий. Если нужен более сложный механизм работы с таймерами, можно использовать дополнительные модули с встроенными таймерами, такие как TimerOne или TimerThree, которые позволяют создавать точные интервалы для запуска различных функций.
Также можно подключить внешние таймеры через интерфейсы SPI или I2C, такие как PCF8563, который поддерживает более широкие возможности настройки с точностью до нескольких миллисекунд. Для более сложных задач, например, управления различными устройствами с точными интервалами, такие таймеры идеально подойдут.
Таким образом, внешний таймер значительно расширяет возможности Arduino в долгосрочных проектах, улучшая стабильность работы и давая точные данные для контроля времени и активации различных действий. При этом важно учитывать правильную настройку и использование подходящих библиотек для обеспечения корректной работы в заданных интервалах.
Реализация задержек и точных интервальных действий с учетом времени работы
Для точного контроля времени работы платы Arduino важно правильно реализовать задержки и интервальные действия. Стандартная функция delay() не всегда подходит, так как она блокирует выполнение других задач в течение заданного времени. Это ограничивает возможности многозадачности и эффективности программы.
Для более гибкого подхода рекомендуется использовать функцию millis(), которая отслеживает время с момента включения устройства в миллисекундах. Она позволяет создавать интервальные задержки, не блокируя выполнение других операций.
- Использование millis() для реализации задержек: Функция millis() возвращает количество миллисекунд с момента запуска. Пример использования:
unsigned long previousMillis = 0;
const long interval = 1000; // Интервал 1 секунда
void loop() {
unsigned long currentMillis = millis();
if (currentMillis - previousMillis >= interval) {
previousMillis = currentMillis;
// Ваш код, который должен выполняться с интервалом
}
}
Этот код выполняет действия каждые 1000 миллисекунд (1 секунда), не блокируя выполнение других операций. Важно учесть, что millis() возвращает 32-битное значение, которое может переполниться через примерно 50 дней работы устройства. Для большинства приложений это не является проблемой, но для критичных систем можно использовать дополнительные методы для обработки переполнения.
- Преимущества использования millis():
- Не блокирует выполнение других процессов.
- Позволяет создать многозадачные приложения с точным контролем времени.
- Используется для реализации таймеров, создания событий и регулярных действий.
- Недостатки:
- Не всегда точна при работе с малыми интервалами (например, менее 10 мс), так как задержки могут варьироваться из-за особенностей работы планировщика.
- Необходимость учета переполнения счетчика времени (через 50 дней).
В более сложных проектах, где требуется высокая точность и многозадачность, можно использовать прерывания. Прерывания позволяют точно реагировать на события, не зависимо от работы основного цикла программы. Пример с использованием таймера для создания точных интервальных задержек:
void setup() {
// Настройка прерывания на таймер
}
void loop() {
// Основной код
}
ISR(TIMER1_COMPA_vect) {
// Код, который выполняется по прерыванию
}
Такой подход позволяет обеспечить точность до микросекунд и минимизировать влияние других процессов на выполнение задачи. Однако для работы с прерываниями требуется более глубокое понимание работы с аппаратными ресурсами Arduino.
Таким образом, для большинства приложений оптимальным решением является использование функции millis() для интервальных действий. В случаях, когда необходима высокая точность, или выполнение задач в реальном времени, лучше применять прерывания, что позволит минимизировать влияние других задач на работу устройства.
Вопрос-ответ:
Как вычислить время работы платы Arduino?
Для вычисления времени работы платы Arduino можно использовать встроенную функцию millis(). Эта функция возвращает количество миллисекунд, прошедших с момента включения платы. Например, можно записать значение, полученное с помощью millis(), в переменную, а затем снова вызвать функцию через определенный интервал времени для вычисления разницы между двумя значениями. Таким образом, можно измерить, сколько времени прошло с момента старта работы устройства.
Можно ли использовать другую функцию для подсчета времени работы платы Arduino?
Да, вместо millis() можно использовать функцию micros(), которая возвращает количество микросекунд, прошедших с момента включения платы. Этот метод точнее, чем millis(), но его использование может быть нецелесообразно в случае, если требуется измерять более длительные интервалы времени, так как он может привести к переполнению данных при длительной работе.
Как избежать переполнения счетчика при использовании millis()?
Переполнение счетчика millis() происходит каждые 49.7 дней, так как функция отсчитывает время в миллисекундах и может хранить только 32-битное значение. Чтобы избежать ошибок из-за переполнения, нужно правильно обрабатывать переполнение, проверяя, не прошло ли оно. Например, можно сравнивать два значения времени с учётом переполнения: если текущее значение меньше предыдущего, это значит, что произошло переполнение, и нужно скорректировать вычисления.
Как точно измерить время работы Arduino в сложных проектах?
Для более точных измерений времени работы платы Arduino в сложных проектах можно использовать внешние таймеры или часовые модули, такие как RTC (Real-Time Clock). Эти модули дают возможность отслеживать время в реальном времени с высокой точностью и минимальными погрешностями. Они подключаются к плате через интерфейсы I2C или SPI и позволяют точно отслеживать продолжительность работы устройства в разных условиях, даже если питание Arduino будет временно отключено.





