Для подключения более одного шагающего двигателя можно использовать расширительные модули, такие как мультиплексоры или контроллеры с множеством выходов. Например, драйверы A4988 могут управлять одним шаговым двигателем на каждый канал, а если использовать несколько таких драйверов, можно подключить большее количество двигателей, ограниченное количеством доступных пинов и необходимым количеством питания для системы.
Рекомендуется не превышать количество двигателей, которое могут безопасно поддерживать ваши пины, и всегда следить за потребляемым током, чтобы не повредить плату Arduino. Если необходимо подключить больше двигателей, стоит рассмотреть использование внешних источников питания или специализированных плат-расширителей для работы с шаговыми двигателями.
Ограничения по количеству шаговых двигателей на одном контроллере Arduino
2. Модели плат Arduino
3. Внешние драйверы
Использование внешних драйверов шаговых двигателей (например, A4988, DRV8825) позволяет значительно уменьшить нагрузку на саму плату Arduino. Эти драйверы могут управлять двигателями через несколько пинов, оставляя другие пины свободными для других задач. Таким образом, с использованием драйверов можно подключить больше шаговых двигателей, чем просто подключая их напрямую к плате Arduino.
4. Электрические ограничения
Arduino не может напрямую обеспечить достаточную мощность для питания шаговых двигателей, особенно если их несколько. Для каждого дополнительного двигателя потребуется внешнее питание, а также соответствующие драйверы для обеспечения нужных токов и напряжений. Использование внешнего источника питания для шаговых двигателей поможет избежать перегрева и повреждения компонентов Arduino.
5. Программные ограничения
В программном плане количество шаговых двигателей, которые можно управлять с помощью Arduino, зависит от сложности программы. Каждый двигатель требует управления не только по пинам, но и через цикл команд для шага. Большое количество двигателей увеличивает нагрузку на процессор Arduino, что может повлиять на стабильность работы, особенно если речь идет о сложных или синхронизированных движениях нескольких двигателей.
6. Рекомендации
Если планируется управление несколькими шаговыми двигателями, рекомендуется:
- Рассматривать использование внешнего питания для двигателей, чтобы не перегружать Arduino.
- Применять библиотеки для управления шаговыми двигателями, такие как AccelStepper, чтобы облегчить разработку сложных движений.
Как выбрать драйверы для подключения нескольких шаговых двигателей
Первое, на что следует обратить внимание – это тип шагового двигателя. Для обычных двухфазных шаговых двигателей можно использовать драйверы, такие как A4988 или DRV8825. Эти драйверы подходят для большинства стандартных шаговых моторов, но важно учитывать их максимальный ток, который они могут предоставить, чтобы избежать перегрева и повреждения компонентов. Если ток двигателя превышает допустимые значения, можно использовать более мощные драйверы, например, TB6600, которые обеспечат стабильную работу при более высоких нагрузках.
При подключении нескольких моторов важным фактором является возможность управления каждым двигателем независимо. Некоторые драйверы позволяют подключать несколько моторов через параллельное соединение, однако для каждого мотора лучше использовать отдельный драйвер, чтобы избежать помех и снизить вероятность возникновения проблем при управлении.
Также стоит учитывать, как драйвер управляет микрошагами. Микрошаги позволяют значительно улучшить точность движения и уменьшить шум при работе шагового двигателя. Современные драйверы, такие как TMC2209, поддерживают различные режимы микрошагов, что позволяет адаптировать работу двигателей под конкретные задачи. Если вам требуется высокая точность, выбирайте драйверы с поддержкой микрошагов от 1/16 и выше.
Не стоит забывать и о питании драйверов. Каждый драйвер требует определенного напряжения для стабильной работы, которое обычно зависит от типа шагового двигателя. Важно выбрать блок питания с соответствующими характеристиками, учитывая как потребности каждого драйвера, так и общую нагрузку на систему. Для этого можно использовать питание с отдельными каналами для каждого драйвера или одно общее питание с должным учетом максимального тока и напряжения.
Когда подключаете несколько драйверов, учитывайте ограничение по количеству доступных пинов на Arduino. Если вам нужно подключить больше моторов, чем позволяет количество пинов на плате, можно использовать расширители, такие как шины I2C или SPI. Это позволит подключить несколько драйверов через одну пару пинов, минимизируя количество проводов.
Кроме того, важно учитывать наличие системы охлаждения для драйверов. При работе с несколькими моторами драйверы могут нагреваться, особенно при высоких токах и нагрузках. Использование радиаторов или активного охлаждения поможет избежать перегрева и продлить срок службы драйверов.
Использование дополнительных плат расширения для подключения двигателей
Одной из популярных плат для управления несколькими шаговыми двигателями является Motor Shield. Эта плата обычно подключается непосредственно к Arduino и позволяет управлять до четырех шаговыми двигателями одновременно, обеспечивая питание и управление через собственные транзисторные схемы. Преимущество таких плат в том, что они упрощают подключение и настройку, а также обеспечивают защиту от перегрева и короткого замыкания.
Другим вариантом являются специализированные драйверы для шаговых двигателей, такие как DRV8825 или A4988. Эти драйверы позволяют подключить один двигатель на каждый канал, но с помощью нескольких таких драйверов можно контролировать более 10 двигателей, используя всего несколько пинов на Arduino. Важно отметить, что для питания двигателей потребуется отдельный источник питания, так как Arduino не может обеспечить необходимую мощность для нескольких шаговых двигателей.
Также существуют платы расширения, такие как Adafruit Motor Shield v2, которые могут управлять до 16 двигателями через шину I2C. Эти решения позволяют существенно расширить возможности стандартной платы Arduino, освобождая пины для других задач. Подключение таких плат требует грамотного распределения нагрузок и учета напряжения для двигателей.
Важно помнить, что при подключении множества двигателей необходимо правильно рассчитывать и распределять нагрузку по источникам питания. В противном случае возможны перебои в работе системы, перегрев или даже повреждение компонентов.
Как правильно распределить нагрузку на пины Arduino при подключении двигателей
При подключении шаговых двигателей к Arduino необходимо учитывать особенности работы пинов и правильное распределение нагрузки, чтобы избежать перегрузки контроллера. Ниже представлены рекомендации для эффективного распределения нагрузки.
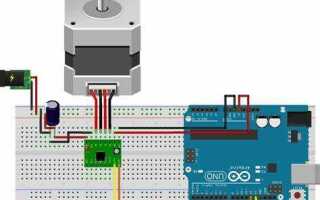
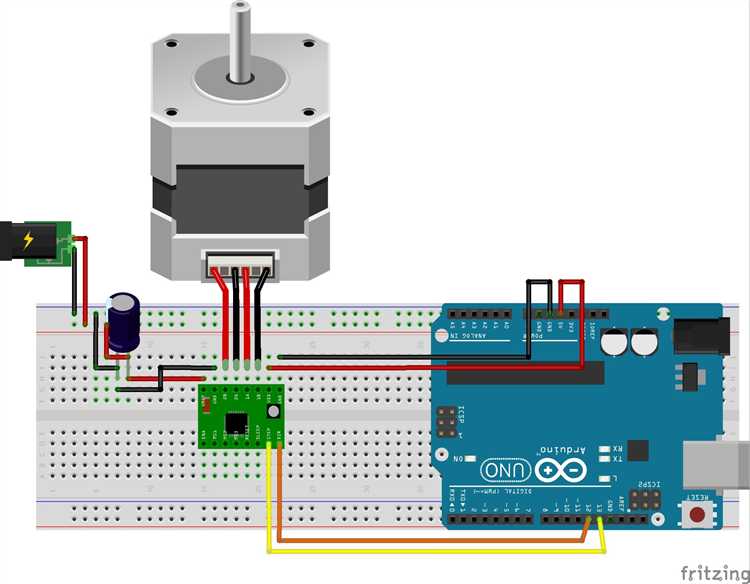
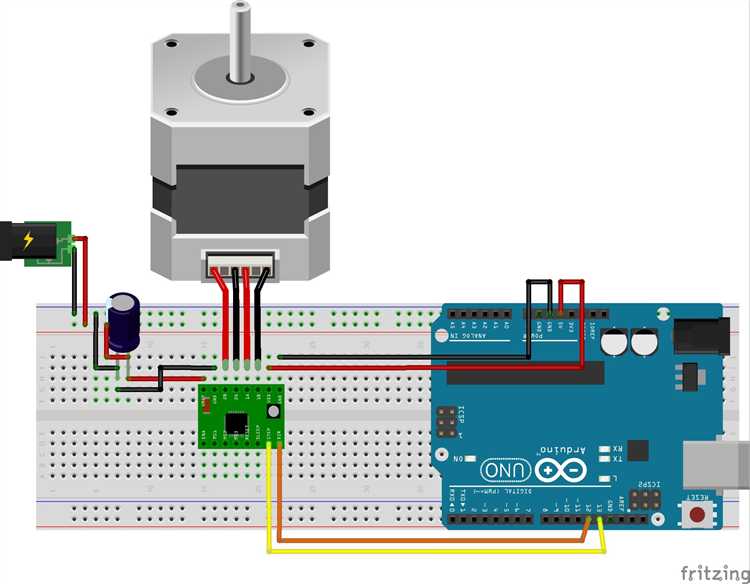
- Использование драйверов для шаговых двигателей: Arduino не может напрямую управлять шаговыми двигателями из-за ограничений по току и напряжению. Для подключения используйте драйверы, такие как A4988 или DRV8825, которые позволяют разгрузить пины Arduino и обеспечивают стабильную работу.
- Частичное использование пинов: Каждый пин Arduino может выдерживать ток до 40 мА. Для большинства шаговых двигателей этого недостаточно, поэтому следует использовать пины для передачи управляющих сигналов (пульс, направление, включение), а силовое подключение передавать через драйверы.
- Подключение нескольких двигателей: Если необходимо подключить несколько шаговых двигателей, можно использовать мультиплексоры или дополнительные контроллеры, такие как расширители пинов (например, с использованием I2C или SPI). Это позволяет подключить больше двигателей, не перегружая основные пины.
- Распределение нагрузки на пины: Для подключения нескольких шаговых двигателей с минимальной нагрузкой на каждый пин, распределите управление между несколькими пинами. Например, используйте 2 пина для каждого двигателя (пин направления и пин пульса), чтобы избежать перегрузки одного пина при подключении нескольких двигателей.
- Использование внешних источников питания: Важно использовать отдельный источник питания для шаговых двигателей, чтобы не перегружать 5 В и 3.3 В пины Arduino. Это поможет избежать скачков напряжения и предотвратить сбои в работе контроллера.
- Тестирование перед подключением: Прежде чем подключать все двигатели, тестируйте каждое подключение на рабочем прототипе. Это поможет выявить возможные проблемы с распределением нагрузки и предотвратить повреждения Arduino.
Соблюдая эти рекомендации, можно обеспечить стабильную работу системы и избежать перегрузки пинов Arduino при подключении нескольких шаговых двигателей.
Роль внешнего питания при подключении шаговых двигателей
Шаговые двигатели требуют стабильного и достаточного питания для корректной работы. Внешнее питание необходимо для обеспечения нужного тока и напряжения, которое не всегда может предоставить стандартный выход Arduino. Подключение шагового двигателя напрямую к плате Arduino может привести к перегрузке контроллера, снижению его производительности или даже повреждению.
Каждый шаговый двигатель имеет свои параметры по напряжению и току, которые могут значительно превышать возможности стандартного питания Arduino (5 В и до 50 мА на один выход). Например, шаговые двигатели с высоким рабочим напряжением (до 12 В и выше) требуют внешнего источника питания для подачи нужного напряжения. При этом питание Arduino используется исключительно для управления сигналами, а не для питания самого двигателя.
Одной из важнейших задач внешнего питания является обеспечение достаточного тока для работы мотора при полной нагрузке. Например, если двигатель потребляет 2 А, то внешний источник должен быть рассчитан на такую величину тока, в то время как Arduino не сможет обеспечить больше 50–100 мА через свои выходы. Это особенно важно при использовании драйверов для шаговых двигателей, таких как A4988 или DRV8825, которые требуют внешнего питания для работы.
При подключении внешнего питания важно учитывать полярность и совместимость с драйвером. Неправильное подключение может привести к перегреву компонентов или выходу их из строя. Также необходимо позаботиться о качестве питания: помимо стабильности, важно, чтобы источник питания имел достаточный запас мощности для работы всего устройства без перегрузок.
Еще один аспект – это необходимость использования общего заземления между Arduino и внешним источником питания. Без этого управление шаговым двигателем будет невозможно, так как сигналы управления от Arduino будут некорректно интерпретироваться драйвером.
Как синхронизировать работу нескольких шаговых двигателей на Arduino
Первый шаг – выбор подходящего драйвера для каждого двигателя. Наиболее распространёнными являются драйверы типа A4988 или DRV8825. Они поддерживают управление несколькими шаговыми двигателями и позволяют легко контролировать направление, скорость и количество шагов. Важно, чтобы каждый драйвер был подключен к отдельному пину на Arduino.
Для синхронизации можно использовать библиотеку AccelStepper, которая упрощает управление несколькими двигателями. Она поддерживает различные режимы работы, включая асинхронную и синхронную работу нескольких двигателей. Чтобы двигатели вращались синхронно, необходимо использовать одинаковые параметры скорости и шага для каждого мотора. Библиотека автоматически синхронизирует движения двигателей, обеспечивая их совместную работу.
Пример синхронизации двух двигателей с использованием AccelStepper:
#includeAccelStepper stepper1(AccelStepper::DRIVER, 2, 5); // Пины для первого двигателя AccelStepper stepper2(AccelStepper::DRIVER, 3, 6); // Пины для второго двигателя void setup() { stepper1.setMaxSpeed(1000); // Максимальная скорость первого мотора stepper2.setMaxSpeed(1000); // Максимальная скорость второго мотора stepper1.setAcceleration(500); // Ускорение первого мотора stepper2.setAcceleration(500); // Ускорение второго мотора } void loop() { stepper1.moveTo(500); // Устанавливаем целевое положение для первого мотора stepper2.moveTo(500); // Устанавливаем целевое положение для второго мотора stepper1.run(); // Запускаем первый мотор stepper2.run(); // Запускаем второй мотор }
В данном примере оба двигателя будут двигаться к одинаковым целям с одинаковой скоростью и ускорением. Для увеличения точности синхронизации можно использовать задержки и корректировать параметры в реальном времени в зависимости от обратной связи от двигателей, например, с использованием энкодеров.
Если двигатели работают с разными скоростями или нагрузками, можно использовать более сложные алгоритмы, такие как фазовый сдвиг для выравнивания движения. Это потребует более детальной настройки и контроля на уровне программного обеспечения. Также можно использовать дополнительные библиотеки для более сложных задач синхронизации, такие как MultiStepper, которая позволяет контролировать несколько двигателей одновременно в более сложных сценариях.
Важно учитывать, что синхронизация может зависеть от качества питания. Несоответствующие источники питания могут привести к различиям в скорости вращения или даже к сбоям в работе двигателей. Поэтому рекомендуется использовать отдельные источники питания для каждого двигателя или обеспечить стабилизированное питание для всей системы.
Как использовать библиотеки для управления несколькими шаговыми двигателями
Библиотека AccelStepper поддерживает работу с различными драйверами шаговых двигателей, такими как A4988, DRV8825, и другие. Она предоставляет функции для плавного и точного управления моторами, включая управление скоростью, ускорением и позиционированием.
Для подключения нескольких шаговых двигателей с использованием этой библиотеки необходимо создать несколько объектов AccelStepper, по одному для каждого двигателя. Пример кода для подключения двух шаговых двигателей с драйверами A4988:
#include
AccelStepper motor1(AccelStepper::DRIVER, 3, 4); // Шаговый двигатель 1
AccelStepper motor2(AccelStepper::DRIVER, 5, 6); // Шаговый двигатель 2
void setup() {
motor1.setMaxSpeed(1000); // Устанавливаем максимальную скорость для первого мотора
motor1.setAcceleration(500); // Устанавливаем ускорение для первого мотора
motor2.setMaxSpeed(1000); // Устанавливаем максимальную скорость для второго мотора
motor2.setAcceleration(500); // Устанавливаем ускорение для второго мотора
}
void loop() {
motor1.moveTo(200); // Устанавливаем целевую позицию для первого мотора
motor2.moveTo(200); // Устанавливаем целевую позицию для второго мотора
motor1.run(); // Выполняем движение для первого мотора
motor2.run(); // Выполняем движение для второго мотора
}
Для более сложных систем можно использовать библиотеку MultiStepper, которая входит в состав AccelStepper. Она позволяет синхронно управлять несколькими шаговыми двигателями, обеспечивая их движение в одном направлении или с одинаковым ускорением.
Для уменьшения нагрузки на процессор и повышения эффективности работы с несколькими моторами, рекомендуется использовать метод runSpeed(), который позволяет двигателям двигаться с постоянной скоростью без необходимости в постоянных вычислениях положения. Это позволяет значительно снизить нагрузку на систему при работе с несколькими шаговыми двигателями одновременно.
Ошибки и проблемы при подключении множества шаговых двигателей к Arduino
Перегрузка пинов Arduino является одной из наиболее частых ошибок при подключении нескольких шаговых двигателей. Каждый шаговый двигатель требует определённого количества пинов для управления его направлениями и шагами. Если использовать более двух двигателей и подключать их напрямую к пинам Arduino, можно столкнуться с ограничениями по количеству доступных пинов. Для решения этой проблемы стоит использовать расширители пинов или контроллеры, такие как драйверы серии L298N или A4988, которые обеспечат управление двигателями через несколько пинов, сохраняя общую нагрузку на плату минимальной.
Неправильный выбор источника питания также может привести к серьёзным проблемам. Шаговые двигатели потребляют значительный ток, особенно при нагрузке. Если используемый источник питания не способен обеспечить достаточную мощность для нескольких двигателей, это может привести к нестабильной работе или перегреву компонентов. Важно выбрать источник питания с соответствующим напряжением и током, соответствующим потребностям всех подключённых двигателей.
Неверное подключение драйверов – ещё одна частая ошибка. Каждый шаговый двигатель требует своего драйвера, и неправильное подключение может привести к повреждению драйвера или самого двигателя. При подключении нескольких драйверов необходимо следить за корректностью соединений: правильным подключением пинов для питания, земли и управляющих сигналов. Многие пользователи сталкиваются с ошибками из-за некорректных соединений проводов или неправильной полярности.
Перегрев драйверов и Arduino – ещё одна проблема, возникающая при подключении множества шаговых двигателей. Каждый драйвер, а также сам Arduino, имеют ограничения по мощности и температуре. Если нагрузка на компоненты слишком велика, они могут перегреться, что приведёт к их поломке. Для предотвращения перегрева можно использовать радиаторы, вентиляторы или более мощные драйверы, которые рассчитаны на более высокие токи.
Недостаточная стабилизация питания также является важным фактором. В случае, если питание нестабильно или присутствуют помехи, двигатели могут работать с ошибками или вообще не запускаться. Чтобы избежать этой проблемы, рекомендуется использовать стабилизаторы напряжения и фильтры, а также проверять качество соединений с источником питания.
Чтобы минимизировать риск возникновения этих проблем, важно заранее продумать схемы подключения и обеспечить достаточную мощность для всех компонентов системы. Также стоит тщательно проверять все соединения и учитывать требования к току и напряжению для каждого элемента системы.
Вопрос-ответ:
Сколько шаговых двигателей можно подключить к Arduino?
Arduino имеет несколько цифровых и аналоговых пинов, которые можно использовать для подключения шаговых двигателей. Количество двигателей зависит от модели Arduino и используемых драйверов. Например, для стандартной модели Arduino Uno обычно можно подключить от одного до нескольких шаговых двигателей, если использовать соответствующие драйверы и делить пины для управления каждым из них.
Можно ли подключить несколько шаговых двигателей к одному пину на Arduino?
Нет, подключить несколько шаговых двигателей к одному пину невозможно, так как каждый двигатель требует индивидуального управления. Для каждого шагающего двигателя нужно использовать отдельные пины для отправки сигналов на соответствующие управляющие драйверы. Это важно для правильной работы мотора и предотвращения повреждений компонентов.
Какие драйверы шаговых двигателей можно использовать с Arduino?
Для управления шаговыми двигателями с Arduino часто используют драйверы типа A4988 или DRV8825. Эти драйверы позволяют подключить шаговый двигатель к Arduino и управлять его вращением, регулируя шаги и направление вращения. Выбор драйвера зависит от мощности двигателя и требований к точности управления.
Что делать, если не хватает пинов для подключения нескольких двигателей?
Если пинов на Arduino недостаточно, можно использовать расширительные платы или мультиплексоры. Также существует возможность подключения нескольких шаговых двигателей через I2C или SPI шины с помощью специализированных плат, таких как контроллеры на основе PCA9685. Это позволяет управлять большим количеством двигателей с ограниченным количеством пинов.
Как можно повысить количество подключаемых шаговых двигателей, если Arduino не справляется?
Для подключения большего количества шаговых двигателей можно использовать несколько Arduino, которые будут работать в связке, распределяя задачи между собой. Также можно использовать дополнительные плату расширения или контроллеры типа CNC Shields, которые позволяют подключить несколько шаговых двигателей к одной системе. В этом случае каждый двигатель будет управляться через отдельный драйвер, подключенный к своему контроллеру.